To make sure that a robot performs well in harsh environments, engineers have to first test them in urban areas, and parkouring is an ideal way of doing that.
RHex (whose name is read Rex – Latin for king) is an all-terrain walking robot that has been developed by the engineers from the University of Pennsylvania quite a while ago. What you will see in this article is in fact XRL (X-RHex-Light), an improved version of RHex that is capable of jumping over obstacles in the same manner that practitioners of parkour do.
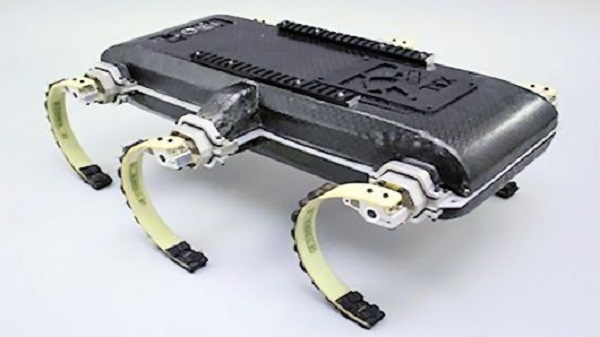
The name suggests that this is a hexapod robot, but all the six legged robots I’ve seen before were resembling insects. This one, on the other hand, has the legs distributed equally on each side of the body, thus making the robot look more like a vehicle. Each leg includes a Maxon 50 watt brushless pancake motor like the one pictured below. All these motors combined generate about 380W, which is approximately half a horsepower.

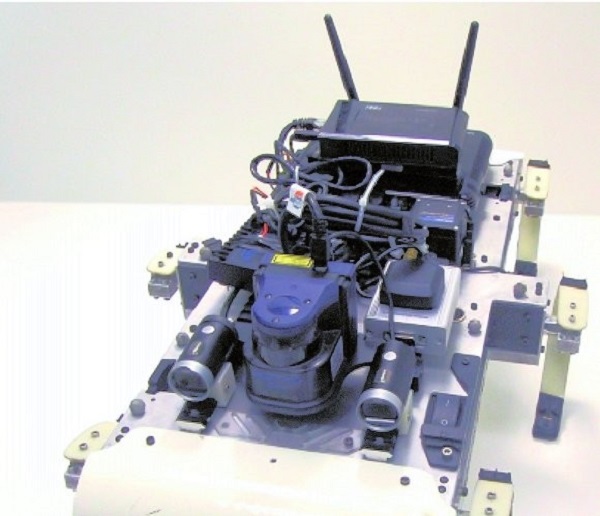
The Parkour robot has no problem carrying stuff. The payload pictured below includes the following:
- two front-facing cameras
- laser scanner
- GPS
- inertial measurement unit
- payload computer
- wireless access point for boosting wireless signals
Some of these accessories help the robot know its location and the obstacles that are in its way. All of them combined make RHex perfect for rescue missions, even though the scientists who built it did not mention anything of the sort.
Graduate student Aaron Johnson stated: “What we want is a robot that can go anywhere, even over terrain that might be broken and uneven. These latest jumps greatly expand the range of what this machine is capable of, as it can now jump onto or across obstacles that are bigger than it is.”

What differentiates XRL from the first-gen RHex is the lighter structure made from carbon fiber. The fabrication methods have also been simplified. Now, XRL measures 51 cm (20 in) in length, 40.5 cm (16 in) in width and 10 cm in thickness. A 0.6 kg ten-cell lithium polymer battery with a capacity of 83 W-hr at 37 volts provides the necessary power.

Check out the following video to see how RHex handles obstacles. The way this hexapod robot reacts when stumbling upon an obstacle is something I’ve never seen before. The fluidity of his movement is something that should be further studied.
If you liked this post, please check the world through Spider-Man’s eyes, since he’s a Parkour expert, and the E3 announcement of Mirror’s Edge 2, a game that includes a tad of parkouring.









